We present a trajectory extraction and behavior-learning algorithm for data-driven crowd simulation. Our formulation is based on incrementally learning pedestrian motion models and behaviors from crowd videos. We combine this learned crowd-simulation model with an online tracker based on particle filtering to compute accurate, smooth pedestrian trajectories. We refine this motion model using an optimization technique to estimate the agents' simulation parameters. We highlight the benefits of our approach for improved data-driven crowd simulation, including crowd replication from videos and merging the behavior of pedestrians from multiple videos. We highlight our algorithm's performance in various test scenarios containing tens of human-like agents.
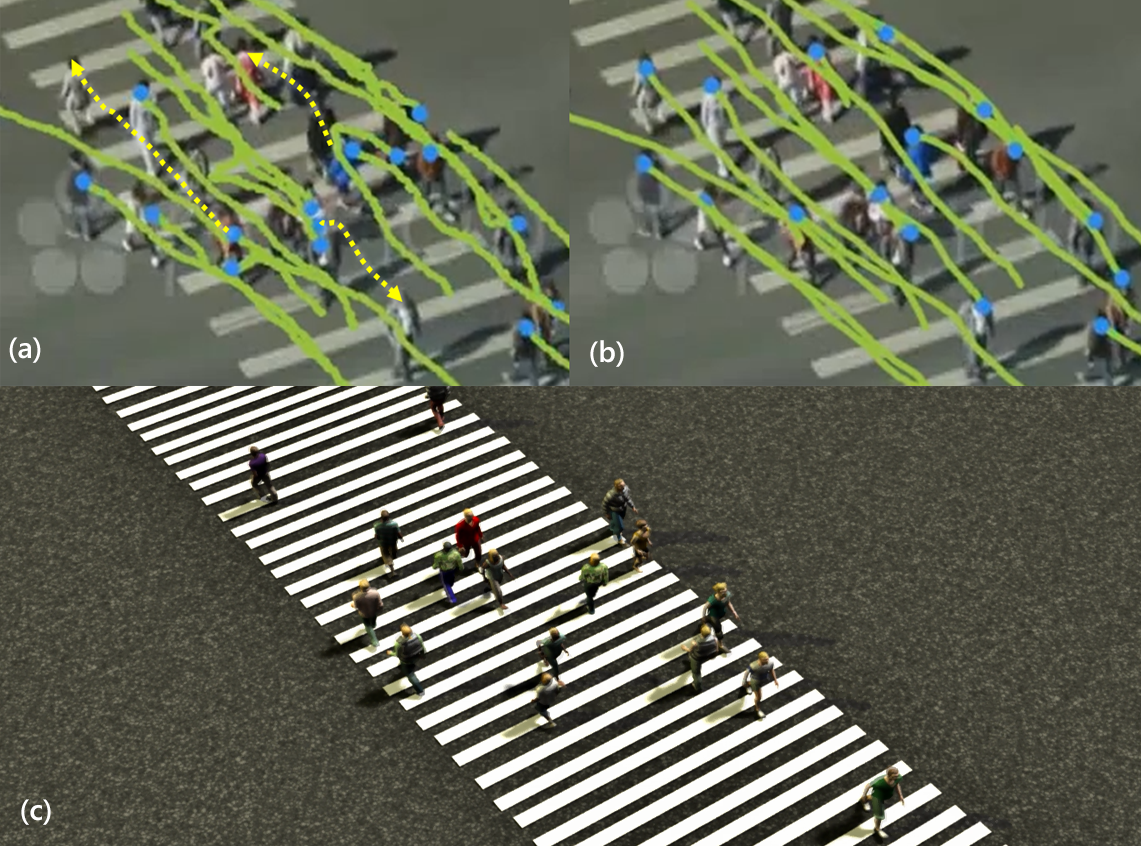 Fig: (a) Pedestrian tracking using a simple particle filter and motion model. Yellow trajectories indicate some of the problems with prior tracking results, e.g. missing or incorrect tracks (b) Tracking using our algorithms with improved accuracy and smooth trajectories. (c) Rendering of the pedestrian trajectories from our data-driven crowd simulation system.
Fig: (a) Pedestrian tracking using a simple particle filter and motion model. Yellow trajectories indicate some of the problems with prior tracking results, e.g. missing or incorrect tracks (b) Tracking using our algorithms with improved accuracy and smooth trajectories. (c) Rendering of the pedestrian trajectories from our data-driven crowd simulation system.
"Efficient Trajectory Extraction and Parameter Learning for Data-Driven Crowd Simulation" [PDF] Aniket Bera, Sujeong Kim, Dinesh Manocha
Proceedings of Graphics Interface 2015 (Halifax, Canada) [To Appear]
This project was funded by Intel, The Boeing Company and National Science Foundation

If you would like to use the dataset, please contact the authors (Aniket Bera, Sujeong Kim and Dinesh Manocha) at ab@cs.unc.edu To see more work on motion and crowd simulation models in our GAMMA group, visit - http://gamma-web.iacs.umd.edu/research/crowds/
![]()