Data-driven Crowd Simulation and Crowd Tracking
Learn about our Data-Driven Crowd work at GAMMA
If you are having trouble streaming the YouTube video, here is the direct download link.
Interactive and Adaptive Data-Driven Crowd Simulation
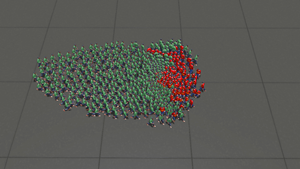
We present an adaptive data-driven algorithm for interactive crowd simulation. Our approach combines realistic trajectory behaviours extracted from videos with synthetic multi-agent algorithms to generate plausible simulations. We use statistical techniques to compute the movement patterns and motion dynamics from noisy 2D trajectories extracted from crowd videos. We also present results from preliminary user studies that evaluate the trajectory behaviours generated by our algorithm.
Project Links:
Interactive and Adaptive Data-Driven Crowd Simulation - Proceedings of VR IEEE 2016 (To Appear) - Sujeong Kim, Aniket Bera, Dinesh Manocha ![]()

Interactive Crowd Content Generation and Analysis using Trajectory-level Behavior Learning
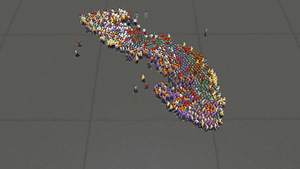
We present a trajectory extraction and behavior-learning algorithm for data-driven crowd simulation. Our formulation is based on incrementally learning pedestrian motion models and behaviors from crowd videos. We combine this learned crowd-simulation model with an online tracker based on particle filtering to compute accurate, smooth pedestrian trajectories. We refine this motion model using an optimization technique to estimate the agents' simulation parameters.
Project Link:
Interactive Crowd Content Generation and Analysis using Trajectory-level Behavior Learning - Proceedings of IEEE International Symposium on Multimedia 2015 (To Appear) - Sujeong Kim, Aniket Bera, Dinesh Manocha ![]()
GLMP - Realtime Pedestrian Path Prediction using Global and Local Movement Patterns
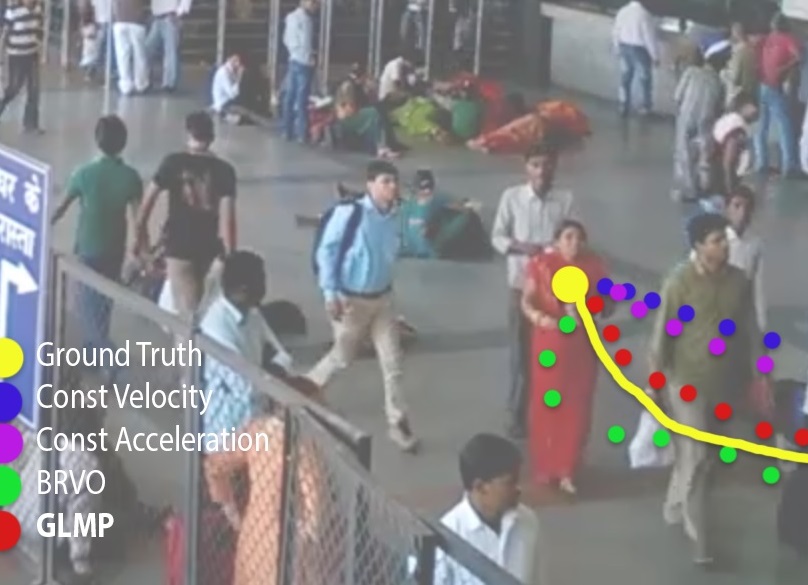
We present a novel real-time algorithm to predict the path of pedestrians in cluttered environments. Our approach makes no assumption about pedestrian motion or crowd density, and is useful for short-term as well as long-term prediction. We interactively learn the characteristics of pedestrian motion and movement patterns from 2D trajectories using Bayesian inference. These include local movement patterns corresponding to the current and preferred velocities and global characteristics such as entry points and movement features.
Project Link:
GLMP- Realtime Pedestrian Path Prediction using Global and Local Movement Patterns - Proceedings of IEEE International Conference on Robotics and Automation 2016 (To Appear) - Aniket Bera, Dinesh Manocha ![]()

Real-time Adaptive Pedestrian Tracking
We present a novel, realtime algorithm to compute the trajectory of each pedestrian in moderately dense crowd scenes. Our formulation is based on an adaptive particle filtering scheme that uses a multi-agent motion model based on velocity-obstacles, and takes into account local interactions as well as physical and personal constraints of each pedestrian.
Project Links:
Realtime Multilevel Crowd Tracking using Reciprocal Velocity Obstacles - Proceedings of IEEE International Conference on Pattern Recognition 2014 - Aniket Bera, Dinesh Manocha ![]()
AdaPT: Real-time Adaptive Pedestrian Tracking for crowded scenes - Proceedings of IEEE International Conference on Robotics and Automation 2014 - Aniket Bera, Nico Galoppo, Dillon Sharlet, Adam Lake, Dinesh Manocha ![]()

Parameter Learning for Data-Driven Crowd Simulation
We present a trajectory extraction and behavior-learning algorithm for data-driven crowd simulation. Our formulation is based on incrementally learning pedestrian motion models and behaviors from crowd videos. We combine this learned crowd-simulation model with an online tracker based on particle filtering to compute accurate, smooth pedestrian trajectories. We refine this motion model using an optimization technique to estimate the agents' simulation parameters.
Project Link:
Online parameter learning for data-driven crowd simulation and content generation - Computers & Graphics (Journal) - Aniket Bera, Sujeong Kim, Dinesh Manocha ![]()
Efficient Trajectory Extraction and Parameter Learning for Data-Driven Crowd Simulation - Proceedings of Graphics Interface 2015 - Aniket Bera, Sujeong Kim, Dinesh Manocha ![]()

Crowd Tracking using a Hybrid Discrete + Continuum Model
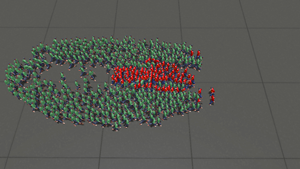
In order to improve the tracking accuracy, we use a hybrid motion model that combines discrete and continuous flow models. The discrete model is based on microscopic agent formulation and is used for local navigation, interaction, and collision avoidance. The continuum model accounts for macroscopic behaviors, including crowd orientation and flow.
Project Link:
REACH - Realtime Crowd tracking using a Hybrid motion model - Proceedings of IEEE International Conference on Robotics and Automation 2015 (To Appear) - Aniket Bera, Dinesh Manocha ![]()

UNC Crowd Scene Analysis Dataset
The main goal of our work is to produce a rich labeled dataset for machine learning. In order to learn high-level features from videos or images, for example performing crowd counting and motion segmentation, a ground truth is often necessary for training or verifies the results. Eventually, we will produce over a million videos, and over 20 million images with ground truth labeled. Our video dataset is generated with a diversity of variations.
Project Link:
UNC Crowd Scene Analysis Dataset Ernest Cheung, Wong Tsan Kwong, Aniket Bera, Dinesh Manocha ![]()