|
||||
|
|
||||
|
2D Benchmark Environments:: (2DOF & 3DOF) |
||||
|
|
|
|
||
|
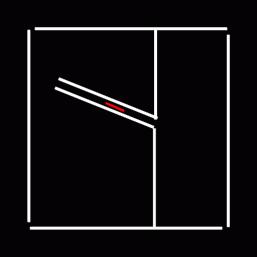
Benchmark 1: An image of a 3DOF planning environment. The robot (in red) moves from the lower left corner through the channel to the upper right corner. |
Benchmark 2: An image of a 2DOF planning environment. The robot navigates a very long narrow passage, the entire maze, from the current position to the open area in the upper left. |
Benchmark 3: An image of a 3DOF planning environment. The robot, a music stand must navigate a large model (approx. 12,000 polygons). |
||
|
|
||||
|
3D Benchmark Environments:: (3DOF & 6DOF) |
||||
|
|
|
|
||
|
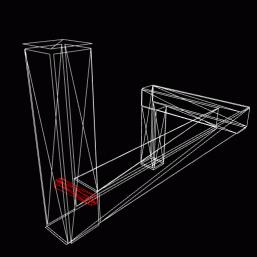
Benchmark 4: A simple 6DOF planning environment. The red block must move from the top to bottom area via the straight tube. |
Benchmark 5: A 6DOF that appears similar to that of Benchmark 4. However, the cspace has tighter narrow passages due to the relatively few number of valid angles in the elbow joints. |
Benchmark 6: A complex 6DOF environment (approx. 2200 polygons). The goal is to move the piano through the window. |
||
|
|
||||
Some Related Projects |
||||
|
||||
|
|
||||
Special Thanks |
||||
|
||||