3D Benchmark Results |
|
Overview This page contains a comparison of two planning techniques, Uniform and Voronoi Based. Uniform sampling refers to an implementation of a probabilistic roadmap planner using a uniform sampling approach. The Voronoi Based Planner is identical to the Uniform sampler in every way, except that sampling is biased toward the medial axis using Hardware accelerated voronoi computations.
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Benchmark 4 - 3D environment requiring the robot (a block) to
move from one open are to the other by traversing a single channel. The
channel provides for a narrow passage that is narrow mostly in workspace. Tunnel Diameter is: .1 on a side. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
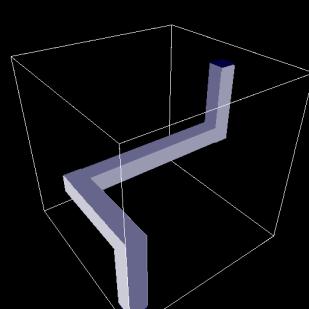
Benchmark 5 - A 3D environment similar to the one in Benchmark
4, but much more difficult. The robot (again a simple block) must navigate
through a single channel that spirals through the workspace. The environment
is more difficult because the "elbows" cause multiple tight
passages in configuration space. Tunnel Diameter is: .1 on a side. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Benchmark 6 - A 3D environment with attempting to guide a
piano through a window.. Scenario (a) - Piano must move from red to blue, moving through the
window. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Copyright 1999. Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the author.
This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder.
geom@cs.unc.edu
last updated: 12/12/1999