Yu Zheng, Ming C. Lin, Dinesh Manocha
GAMMA Group
Department of Computer Science
University of North Carolina at Chapel Hill
Albertus Hendrawan Adiwahono, Chee-Meng Chew
Department of Mechanical Engineering
National University of Singapore
| Submitted to IROS 2010 | |
This paper presents a new method to generate biped walking patterns for humanoid robots on non-horizontal terrains. Instead of the ZMP (zero-moment point), a universal stability criterion is employed, which checks if the sum of the gravity and the inertia wrench of a robot lies in the convex cone of the wrenches resulting from contacts between the robot and the environment. The gravity wrench can be viewed as a point in wrench space, depending only on the position of the CoM (center of mass). At a certain position of the CoM, determining a feasible linear acceleration of the CoM without breaking the robot’s stability can be formulated as the problem of computing the intersection of the convex cone with a ray originating from the point that represents the gravity wrench. We develop an algorithm to compute the feasible acceleration and present a method to generate biped walking patterns based on it. Because of the generality of the stability criterion used here, the proposed method can be applied to more general situations than the ZMP-based approaches, including a robot walking on uneven terrains.
|
|
Demonstrations |
|
 |
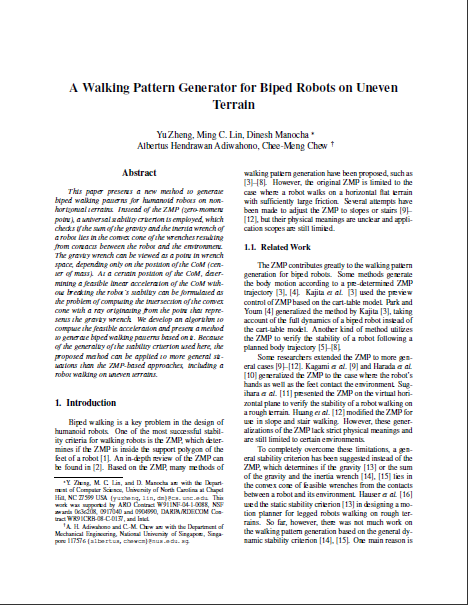
Walking over 5 connected slopes Slope angles: 20, -10, 10, -15, -5 degrees (from left to right) Slope lengths: 350, 400, 400, 350, 334 mm download (AVI, 9.84MB) |
 |
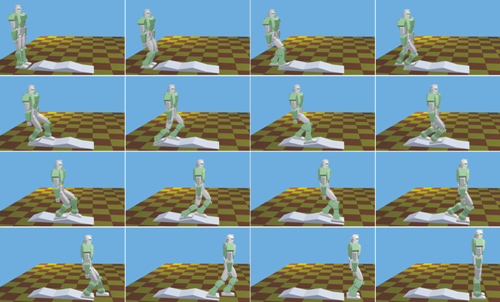
Walking over another 5 connected slopes Slope angles: 15, -10, 20, -15, -10 degrees Slope lengths: 450, 400, 400, 400, 462 mm download (AVI, 9.79 MB) |
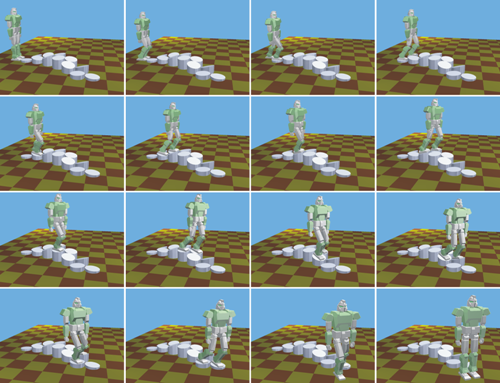 |
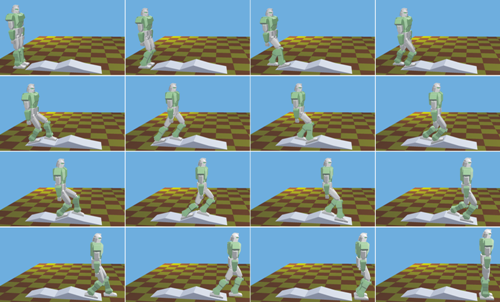
Walking over 12 cylinders The cylinders are placed along a circle with a sweep angle of 60 degrees. Their upper surfaces are slopes, which face along the (inward or outward) normal or (forward or backward) tangent of the circle. The inclination angles are Right side: 5, 10, 20, 5, 15, 5 degrees The central heights of the cylinders are Right side: 50, 150, 250, 300, 200, 100 mm download (AVI, 19.4MB) |