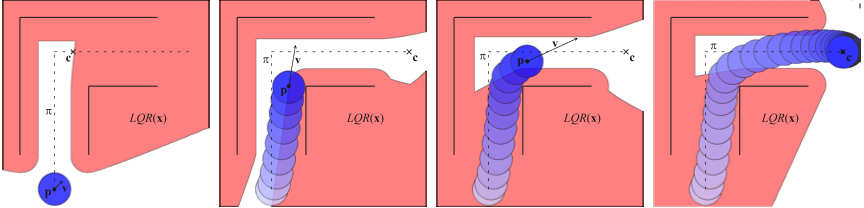

Simulated Quadrotor navigates an simple S-shaped maze using LQG-Obstacle. A simple guiding path is given consisting of four straight lines through the center of the corridor.
Video: [WMV (0.9 MB)] [YouTube]

Simulated Quadrotor navigates an simple S-shaped maze using LQG-Obstacles. A simple guiding path is given consisting of several short, straight segments thorough the center of each window.
Video: [WMV (1.3 MB)] [YouTube]